-
金桅杆校企合作项目
 项目背景
建设方案
建设成果
未来展望
项目背景
建设方案
建设成果
未来展望
-
智能网联汽车技术
CAN总线检测分析开发平台
车路协同智慧灯杆
无人驾驶观光车
无人驾驶接驳车
智能网联人机共驾乘用车开发平台
智能网联乘用车高级开发教学平台
智能网联乘用车基础开发教学平台
智能网联实训小车
-
新能源汽车技术
新能源汽车驱动教学实训系统
混合动力驱动装置解剖展示台
混合动力驱动装置拆装实训台
新能源三小电系统高压元件检测平台
新能源汽车空调系统检测实训台
整车电器与底盘系统检测实训台
新能源三大电系统检测实训台
智慧整车无损检测平台(混动)
-
无人驾驶实验室
智慧城市沙盘
自动驾驶室内开发套件
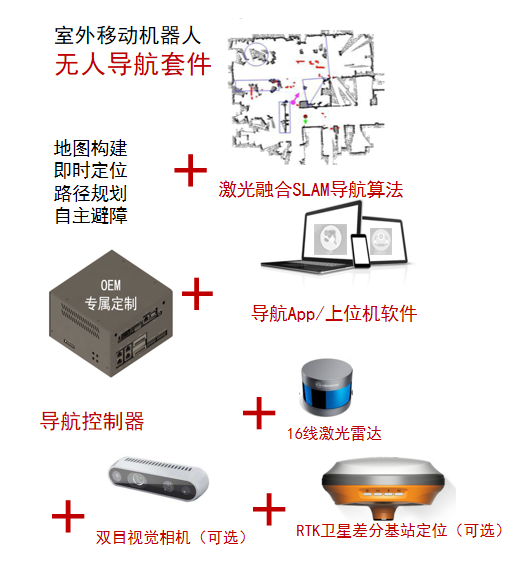
自动驾驶室外开发套件
自动驾驶观光车底盘
自动驾驶线控底盘
新能源汽车与智能联网汽车综合实践与教学科研平台
-
生态合作